





Long-Short Term Memory Auto-Encoder based Position Prediction Model for Fixed-wing UAV during Communication Failure
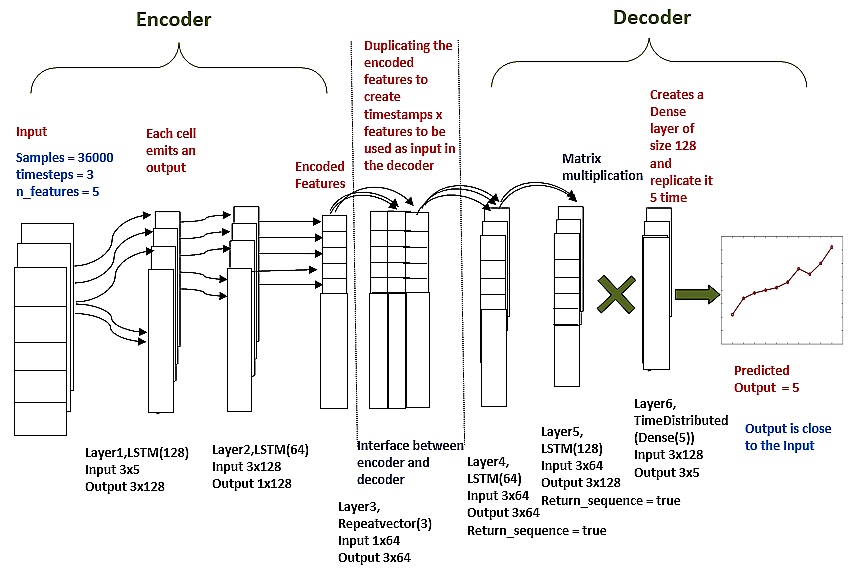
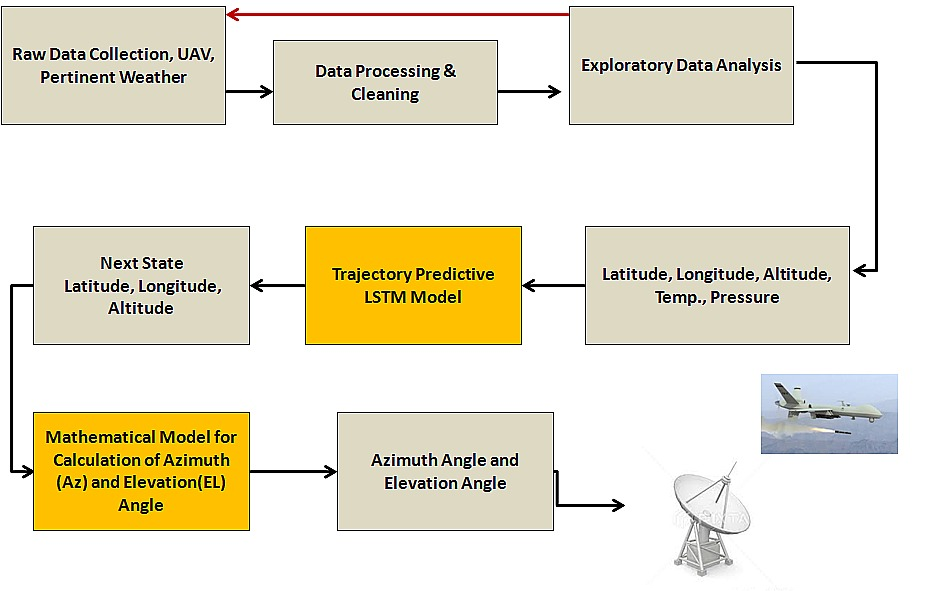
| Abstract | The research addresses a critical issue of handling communication failure between Ground Data Terminal (GDT) and Unmanned Aerial Vehicles (UAVs) safe flight in real-time. This necessitates the design of an accurate UAV Position Finding (UPF) prediction model. Though in literature, traditional Aerodynamics model-based methods exist for trajectory prediction, we adopt deep neural network application for successfully pointing the Ground Data Terminal towards UAV. As per our knowledge, we are the first to propose LSTM-AE based model for UPF. This, in turn, also avoids complex coefficients with more accuracy and makes it highly beneficial for safety-critical and defence applications. |
| Faculty |
Poonam Saini
|
|
poonamsaini@pec.edu.in
|
|
| Collaborations | DEAL (DRDO), Dehradun |
| More Information | DOI of the recent published article: 10.1109/TAI.2022.3153763 |